Lineární algebra srozumitelně

Soustavy lineárních algebraických rovnic
Úvod: Historie lineární algebry je otočená "nohama vzhůru". Odvíjela se totiž v opačném pořadí, než jak se dnes běžně vyučuje v prvním ročníku vysokých škol technického směru. Paradoxně se tedy nejprve objevily determinanty, až po nich matice a teprve začátkem 20. století se začal prosazovat pojem vektorový prostor. Úplně na začátku všeho stály a celým vývojem prostupovaly soustavy lineárních algebraických rovnic. Vždyť také algebra má původ ve slově al-jabr, které použil jako první v 9. století arabský matematik Al-Khwarizmi pro označení "sečtení 2 rovnic s cílem zbavit se neznámé".
Soustava lineárních algebraických rovnic: Prozraďme nyní, co je to soustava LAR. Nechť je dáno $m\cdot n$ koeficientů $a_{ij}$ a $m$ koeficientů pravé strany $b_i$. My budeme uvažovat ve valné většině úloh koeficienty reálné, ale samozřejmě v historii vždy počtáři pracovali s takovými čísly, která znali. Nejprve s přirozenými, poté racionálními kladnými a zápornými celými čísly, nakonec s reálnými a komplexními a dnes umíme pracovat i s koeficienty ještě obecnějšími, což ale v tuto chvíli není předmětem našeho zájmu. Řešit soustavu $m$ lineárních algebraických rovnic o $n$ neznámých znamená najít reálnou $n$-tici čísel ($x_1, x_2, \dots, x_n$), která vyhovují následujícím rovnicím.
Termín lineární souvisí s tím, že se neznámé $x_i$ vyskytují v první mocnině, tedy pouze jako $x_i^1$.
Velmi užitečné jsou pojmy matice soustavy a rozšířená matice soustavy.
Získáme je tak, že koeficienty sestavíme do tabulek následujícím způsobem.
- Vyjádříme z poslední rovnice $x$ a v první a druhé rovnici $x$ tímto vyjádřením $x=-y-2z$ nahradíme, $$\begin{matrix} 3(-y-2z)&+&2y&+&4z&=&1\\ 2(-y-2z)&-&y&+&z&=&2 \end{matrix}$$ Odtud dostaneme soustavu, která má jistě stejné řešení jako původní, a to $$\begin{matrix} x&=&-y&-&2z \\ -y&-&2z&=&1\\ -3y&-&3z&=&2 \end{matrix}$$ Nyní se soustřeďme na rovnice, které $x$ neobsahují. Z první z nich vyjádříme $y$ a toto vyjádření do druhé z nich dosadíme $y=-2z-1$ $$\begin{matrix} -3(-2z-1)&-&3z&=&2 \end{matrix}$$
- záměna pořadí rovnic,
- vynásobení rovnice nenulovým číslem,
- přičtení či odečtení násobku jiné rovnice od rovnice vybrané.
Zde je program, který metodami analogickými předchozímu příkladu hledá řešení jakékoliv soustavy 3 rovnic pro 3 neznámé, ovšem za podmínky, že tato soustava má řešení jediné.
Dávná historie: Egypťané a Babyloňané již před 4000 lety řeší soustavy 2 LAR o 2 neznámých. Takové úlohy zapisují pouze slovně, vždy řeší soustavy s konkrétními číselnými koeficienty, které mají původ v praktických úlohách (Egypťané počítají měřice ječmene a Babylonci gury obilí). Koeficienty jsou jen přirozená čísla a jako výsledek připouští i jednoduché zlomky.
150 - 50 př. n. l. Číňané v 8. kapitole Devíti traktátů o matematickém umění
 (také se někdy říká Matematika v devíti kapitolách) řeší 18 slovních úloh vedoucích na soustavy LAR, používají metodu fang čcheng, která je předchůdkyní Gaussova eliminačního algoritmu a používá sloupcové úpravy. Čínští počtáři umí pracovat s přirozenými čísly a jednoduchými zlomky, ale v mezivýpočtech připouští i čísla záporná, definují základní aritmetické operace s takovými čísly, ale barví je červenou tuší a nepovažují je ještě za plnohodnotná čísla.
(také se někdy říká Matematika v devíti kapitolách) řeší 18 slovních úloh vedoucích na soustavy LAR, používají metodu fang čcheng, která je předchůdkyní Gaussova eliminačního algoritmu a používá sloupcové úpravy. Čínští počtáři umí pracovat s přirozenými čísly a jednoduchými zlomky, ale v mezivýpočtech připouští i čísla záporná, definují základní aritmetické operace s takovými čísly, ale barví je červenou tuší a nepovažují je ještě za plnohodnotná čísla.
Japonec Takakazu Šinsuke Seki Kowa (1642-1708) a jeho žáci rozvíjí metodu fang čcheng a jejím prostřednictvím dospívají k pojmu determinant. Seki Kowa (na obrázku) bývá občas považován za objevitele determinantu.
Staří Řekové, ač jsou považováni za zakladatele opravdové matematiky (stojí u zrodu toho nejdůležitějšího v celé matematice - nutnosti tvrzení dokázat), k rozvoji řešení soustav LAR významně nepřispěli. Jedním z důvodů byla zřejmě jejich složitá číselná soustava, v níž se aritmetické výpočty prováděli obtížně, druhým pak jejich zájem zaostřený na geometrii. Právě kvůli geometrii pracují jen s kladnými zpočátku pouze racionálními čísly (záporná čísla nemohou představovat délku úsečky či obsah nějakého útvaru).
Teprve indický učenec Brahmagupta přichází v 7. stol. s definicí nuly jakožto čísla (poziční nula, která značí prázdné místo v zápisu čísel v pozičních číselných soustavách, má kořeny již ve staré Babylonii). Brahmagupta definuje operace s nulou a se zápornými čísly (představuje si je jako dluh). Od této chvíle se koeficienty i výsledky v soustavách LAR mohou pohybovat i v oblasti záporných čísel. Další indickou zajímavostí je, že neznámým dávají jména barev. Do středověké Evropy se indické poznatky dostávají prostřednictvím Arabů.
Do 17. století: V 16. stol. se začíná vytvářet algebraická symbolika. François Viète v Analytickém umění značí neznámé samohláskami a koeficienty souhláskami a užívá dnešní znaky pro plus a mínus +,-. Navíc jako první vyjadřuje tvar řešení soustavy v závislosti na koeficientech - i slovo koeficient je od něj. Dnešní značení se poprvé objevuje u Reného Descarta: koeficienty značí $a, b, c, \dots$ neznámé $x, y, z,\dots $ a soustavu zapisuje tak, že je na pravé straně každé rovnice nula.
Determinant: Ukažme si nejprve, jak spočíst determinant matice rozměru $2 \times 2$ a $3 \times 3$ (matici si představujme jako tabulku čísel). K tomu se hodí oblíbené Sarrusovo pravidlo, které ilustruje obrázek s modrými a červenými šipkami. Jak uvidíme dále, pro zápis determinantu matice $\mathbb A$ se používá $\text{det}({\mathbb A})$ nebo se matice píše mezi svislé čáry.
Chceme-li vypočítat determinant matice $\mathbb A=\left(\begin{matrix}1 &0&1\\ 1&2&0\\ 2&1&3\end{matrix} \right),$ bereme součiny prvků spojených modrými šipkami se znaménkem plus a součiny prvků spojených červenými šipkami se znaménkem mínus. $$\left|\begin{matrix}1 &0&1\\ 1&2&0\\ 2&1&3\end{matrix} \right|=$$ $$=1\cdot 2\cdot 3+1\cdot 1\cdot 1+2\cdot 0\cdot 0-2\cdot 2\cdot 1-1\cdot 1\cdot 0-1\cdot 0\cdot 3=3.$$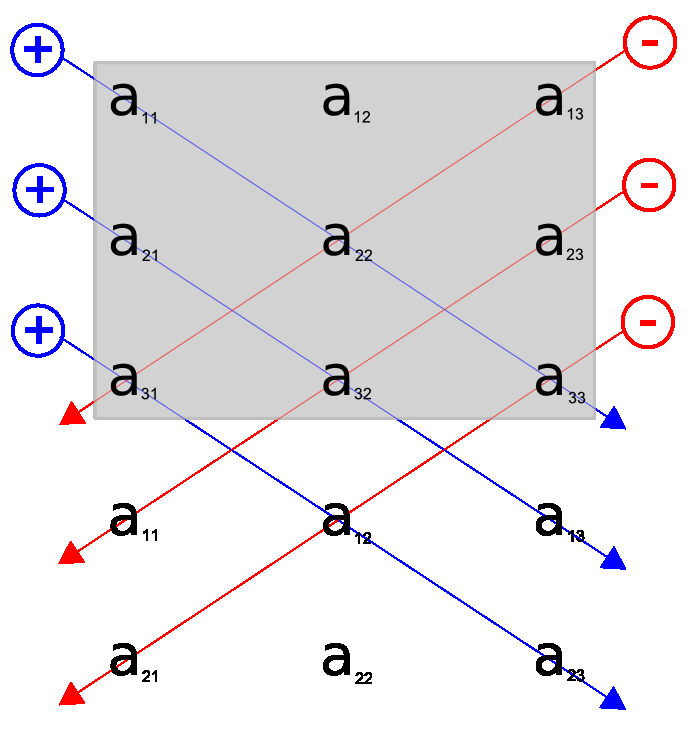
Za objevitele determinantu bývá obvykle považován Gottfried Wilhelm Leibniz (1646 Lipsko - 1716 Hannover).
V roce 1693 píše dopis markýzi L’Hospitalovi, ve kterém tvrdí, že pokud soustava $n + 1$ LAR o $n$ neznámých s pravou stranou má řešení,
pak je nutně determinant rozšířené matice soustavy nulový. Nepoužívá ještě ovšem slovo determinant,  protože takové označení použije poprvé až Gauss, a samozřejmě ani matice, poněvadž s tím přijde ještě o něco později Sylvester.
Leibniz v dopise chválí své novátorské značení: $ij$ pro koeficient $a_{ij}$ a $i0$ pro $i$-tou složku
pravé strany $b_i$. Soustava $3\times 3$ při použití Leibnizova značení vypadá následovně:
$$\begin{matrix}10 &+& 11x &+& 12y &+& 13z &=& 0\\
20 &+& 21x &+& 22y &+& 23z &=& 0\\
30 &+& 31x &+& 32y &+& 33z &=& 0
\end{matrix}$$
Popis vytváření determinantu je nepraktický, a tak jeho nápad zůstává bez ohlasu.
protože takové označení použije poprvé až Gauss, a samozřejmě ani matice, poněvadž s tím přijde ještě o něco později Sylvester.
Leibniz v dopise chválí své novátorské značení: $ij$ pro koeficient $a_{ij}$ a $i0$ pro $i$-tou složku
pravé strany $b_i$. Soustava $3\times 3$ při použití Leibnizova značení vypadá následovně:
$$\begin{matrix}10 &+& 11x &+& 12y &+& 13z &=& 0\\
20 &+& 21x &+& 22y &+& 23z &=& 0\\
30 &+& 31x &+& 32y &+& 33z &=& 0
\end{matrix}$$
Popis vytváření determinantu je nepraktický, a tak jeho nápad zůstává bez ohlasu.
Determinanty se dostávají do centra pozornosti matematiků přesně v polovině 18. století.
 V roce 1750 publikuje švýcarský matematik Gabriel Cramer Introduction à
l'analyse des lignes courbes algébriques (Úvod do analýzy algebraických křivek).
Cramera vedl k řešení soustav
problém nalezení kuželosečky procházející konkrétními 5 body v rovině. Připomeňme, že rovinná kuželosečka je množina bodů $(x,y)$, které
splňují rovnici $x^2 + Ay^2 + Bxy + Cx + Dy + E = 0$. Jistě příklady takových kuželoseček znáte:
V roce 1750 publikuje švýcarský matematik Gabriel Cramer Introduction à
l'analyse des lignes courbes algébriques (Úvod do analýzy algebraických křivek).
Cramera vedl k řešení soustav
problém nalezení kuželosečky procházející konkrétními 5 body v rovině. Připomeňme, že rovinná kuželosečka je množina bodů $(x,y)$, které
splňují rovnici $x^2 + Ay^2 + Bxy + Cx + Dy + E = 0$. Jistě příklady takových kuželoseček znáte:
- kružnice $x^2+y^2-1=0$
- elipsa $\frac{x^2}{2}+y^2-1=0$
- hyperbola $x^2-y^2-1=0$
- parabola $x^2 - y = 0$